In this series we will introduce and discuss new preprints that are somehow related to the topics of the programme “Geometry at Infinity”. By incidence, this first article fits not only the topic, but also the title of this blog: the boundary at infinity.
Charney, Murray: A rank-one CAT(0) group is determined by its Morse boundary, https://arxiv.org/pdf/1707.07028.pdf
It is well-known that (Gromov-)hyperbolic spaces can be studied through their boundary at infinity, which is defined as the set of equivalence classes of geodesic rays, where two rays are equivalent if they have bounded distance. This set is equipped with a natural topology such that isometries of the hyperbolic space act continuously on the boundary at infinity.
As examples one may think of the hyperbolic plane with its boundary at the infinity the projective line, on which the orientation-preserving isometry group PSL(2,R) acts by projective linear transformations, or similarly the hyperbolic 3-space, whose boundary at infinity is the complex projective line with the orientation-preserving isometry group PSL(2,C) also acting by projective linear transformations.
Projective linear transformations can be characterized by the property that they preserve the cross-ratio of any 4-tuple of points, so one gets a characterisation of isometries just by looking at their behavior on the boundary at infinity: a map is an isometry if and only if its boundary map is continuous and preserves all cross-ratios.
A similar characterization exists for quasi-isometries of (Gromov-)hyperbolic spaces: a map between two of them is an quasi-isometry if and only if its boundary map is continuous and quasi-Möbius, which means that it almost preserves a certain cross-ratio (Paulin: Un Groupe Hyperbolique Est Déterminé Par Son Bord, <i>Journal of the London Mathematical Society</i>, Volume 54, Issue 1, 1996, Pages 50–74).
A longstanding meta-problem with many competing approaches is to find a notion of boundary at infinity that works not only for Gromov-hyperbolic spaces. For example, for symmetric spaces of noncompact type there is for example the same boundary at infinity either with the usual topology or with the Tits metric, and there is also the Fürstenberg boundary (where boundary points get identified if they belong to the same chamber of the building at infinity) and there are several others (Borel, Ji: Compactifications of symmetric and locally symmetric spaces).
One problem that one has with the “natural” definition of the boundary at infinity for CAT(0) spaces is that quasi-isometries do not always have a continuous boundary map. The reason is basically that quasi-geodesics in CAT(0) spaces do not always have the Morse property, i.e., are not necessarily close to a geodesic. A bad example is the logarithmic spiral in the plane. So the usual definition of boundary maps (given a boundary point, take a geodesic ray converging to it, consider its image under the quasi-isometrisch, which is a quasi-geodesic ray, close to a geodesic ray, define its endpoint to be the image under the boundary map of your given point) will not work for CAT(0) spaces.
A way out is to consider only the Morse boundary of CAT(0) spaces. To define it one considers for any number D the set of D-contracting geodesic rays starting at a fixed base point. These D-contracting rays are by definition the geodesic rays L with the property that for any points x,y satisfying d(x,y)<d(x,L) the projections of x and y to L are at most distance D apart, i.e.,
d(π(x),π(y)) ≤D.
The Morse boundary is then defined as the direct limit for D to infinity of the sets of D-contracting geodesic rays (Charney, Sultan: Contracting boundaries of CAT(0)-spaces, Volume 8, Issue 1, 2015, Pages 93–117).
The natural question is then of course what the generalization of Paulin’s theorem to this setting looks like and this is what is answered in the new preprint by Charney-Murray: a map between proper, cocompact, non-elementary (i.e., the Morse boundary consists of at least 3 points) CAT(0) spaces is a quasi-isometry if and only if its boundary map is continuous, quasi-Möbius and 2-stable.
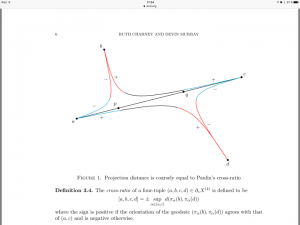
Here, 2-stability means that for any D there is an C such that any pair of points at infinity that bounds only D-contracting bi-infinite geodesics is (by the continuous mapping) mapped to a pair of points that bounds only C-contracting bi-infinite geodesics. And quasi-Möbiusness means that a natural cross-ratio is almost preserved, namely the cross-ratio [a,b,c,d] defined in the picture below as the distance between the projections of b and d to the line through a and c. (This is the logarithm of the cross-ratio usually considered in hyperbolic geometry.)
The condition that the Morse boundary contains at least 3 points is satisfied for cocompact CAT(0) spaces when the acting group is of rank one (there is some element of rank one, i.e., having an axis which doesn’t bound a flat half plane, cf. Hamenstädt: Rank-one isometries of proper CAT(0)-spaces, Contemporary Math. 501 (2009), 43–59) and not virtually cyclic. So for this class of CAT(0) groups the Morse boundary determines the quasi-isometry type.